Camara Moravian Monocrome C1-3000A CMOS Sony IMX265 sensor
Los modelos de cámara C1 están equipados con detectores CMOS de obturador global Sony IMX con píxeles cuadrados de 3,45 × 3,45 μm. Los modelos individuales difieren solo en la resolución.
Todos los sensores usados utilizan un obturador electrónico global. Esto significa que cada píxel dentro de la imagen se expone al mismo tiempo, a diferencia de los sensores de obturador rodante, que exponen líneas individuales una tras otra. No hay diferencia para las exposiciones prolongadas de objetos estáticos, pero la imagen de objetos en movimiento usando un tiempo de exposición corto con el obturador enrollable conduce a distorsiones en la forma de la imagen.
Hay dos líneas de cámaras C1 disponibles según el rango dinámico disponible (profundidad de bits de los píxeles digitalizados):
-
Cámaras C1 con sensores Sony IMX compatibles con digitalización de 8 y 12 bits. Debido a que cada píxel de 12 bits ocupa dos bytes cuando se transfiere a la PC anfitriona, el tiempo de descarga de la imagen de 12 bits es mayor en comparación con la imagen de 8 bits. El FPS máximo en modo de 8 bits es significativamente mayor.
-
Cámaras C1 con sensores Sony IMX que solo admiten digitalización de 12 bits. Como el modo de lectura de 12 bits siempre se usa para aplicaciones de exposición prolongada (fotografía astronómica, investigación científica) de cualquier manera, el menor tiempo de descarga teórico en el modo de 8 bits no presenta limitaciones para los escenarios del mundo real. Si todos los demás parámetros son iguales (tamaño del sensor, resolución, tamaño de píxeles, ruido, etc.), el precio más bajo de estas cámaras puede resultar muy atractivo.
Modelos de cámara C1 con digitalización de 8 y 12 bits:
| Modelo |
sensores CMOS |
Resolución |
Tamaño de píxel |
Área de imagen |
| C1-1500 |
IMX273 |
1456 × 1088 píxeles |
3,45 × 3,45 micras |
5,02 × 3,75 mm |
| C1-3000 |
IMX252 |
2064 × 1544 píxeles |
3,45 × 3,45 micras |
7,12 × 5,33 mm |
| C1-5000 |
IMX250 |
2464 × 2056 píxeles |
3,45 × 3,45 micras |
8,50 × 7,09 mm |
| C1-12000 |
IMX253 |
4112 × 3008 píxeles |
3,45 × 3,45 micras |
14,19 × 10,38 mm |
Solo modelos de cámara C1 con digitalización de 12 bits:
| Modelo |
sensores CMOS |
Resolución |
Tamaño de píxel |
Área de imagen |
| C1-3000A |
IMX265 |
2064 × 1544 píxeles |
3,45 × 3,45 micras |
7,12 × 5,33 mm |
| C1-5000A |
IMX264 |
2464 × 2056 píxeles |
3,45 × 3,45 micras |
8,50 × 7,09 mm |
| C1-12000A |
IMX304 |
4112 × 3008 píxeles |
3,45 × 3,45 micras |
14,19 × 10,38 mm |
Las cámaras C1 están diseñadas para trabajar en cooperación con una computadora personal (PC) anfitriona. A diferencia de las cámaras fotográficas digitales, que funcionan de forma independiente en la computadora, las cámaras científicas generalmente requieren una computadora para el control de la operación, la descarga de imágenes, el procesamiento y el almacenamiento, etc. Para operar la cámara, necesita una computadora que:
-
Es compatible con un estándar de PC y ejecuta un sistema operativo Windows moderno de 32 o 64 bits.
-
Es compatible con un PC estándar y ejecuta un sistema operativo Linux de 32 o 64 bits.
-
También se incluye soporte para computadoras Apple Macintosh basadas en x64.
Las cámaras C1 están diseñadas para conectarse con la PC anfitriona a través de la interfaz USB 3.0, operando a 5 Gbps. Las cámaras también son compatibles con el puerto USB 2.0 para comunicarse con una PC anfitriona.
Como alternativa, es posible utilizar el dispositivo adaptador Ethernet de cámara Moravian . Este dispositivo puede conectar hasta cuatro cámaras Cx (con sensores CMOS) o Gx (con sensores CCD) de cualquier tipo y ofrece una interfaz Ethernet de 1 Gbps y 10/100 Mbps para conexión directa a la PC host. Debido a que la PC luego usa el protocolo TCP/IP para comunicarse con las cámaras, es posible insertar un adaptador WiFi u otro dispositivo de red en la ruta de comunicación.
Sistema de cámara C1
Los componentes del sistema de cámara C1 incluyen:
-
Cabezal de cámara C1 con adaptador de montura CS
-
Cabezal de cámara C1 con rosca en T combinada (M42×0,75) y adaptador de montura CS
-
Adaptador de montura C/CS a cilindro de 1,25”
-
Variante corta (10 mm) de montura C/CS para adaptador de cilindro de 1,25”, diseñado para usarse con OAG
-
Adaptador de guía fuera de eje (OAG) a cámara refrigerada grande (C2/C3/C4 o G2/G3/G4)
-
Tubo de extensión con rosca M48 × 0,75 y distancia focal trasera de 55 mm
-
Tubo de extensión con rosca M42 × 0,75 y distancia focal posterior de 55 mm (adaptador de rosca en T estándar)
-
Adaptador para lente de bayoneta Canon EOS
-
Adaptador para lente de bayoneta Nikon
La función principal de la electrónica de la cámara CMOS, además de la inicialización del sensor y algunas funciones auxiliares, es transferir datos desde el detector CMOS a la PC host para su almacenamiento y procesamiento. Por lo tanto, a diferencia de las cámaras CCD, el diseño de la cámara CMOS no puede influir en la cantidad de características importantes de la cámara, como el rango dinámico (profundidad de bits de los píxeles digitalizados).
Los sensores utilizados en las cámaras C1 muestran muy buena linealidad en respuesta a la luz. Esto significa que la cámara también se puede utilizar para proyectos de investigación de nivel de entrada, como por ejemplo fotometría o estrellas variables más brillantes, etc.
 respuesta a la luz")
C1-3000 (IMX252) respuesta a la luz
Como ya se señaló, hay dos líneas de la serie de cámaras C1, que difieren en el sensor utilizado. La primera serie ofrece cuatro modos de lectura diferentes:
-
Modo lento de 8 bits con una velocidad de digitalización de ~132 MPx/s
-
Modo lento de 12 bits con una velocidad de digitalización de ~72 MPx/s
-
Modo rápido de 8 bits con una velocidad de digitalización de ~263 MPx/s
-
Modo rápido de 12 bits con una velocidad de digitalización de ~132 MPx/s
La versión "A" de las cámaras C1 ofrece solo un modo de lectura único:
Las velocidades de digitalización mencionadas anteriormente son válidas para conexión USB 3.0. También tenga en cuenta que las velocidades de digitalización no conducen necesariamente a los FPS correspondientes, ya que cada imagen descargada debe procesarse y mostrarse, lo que también consume tiempo. Este tiempo es insignificante, si la cámara de escaneo lento necesita muchos segundos para descargar la imagen, pero en el caso de las cámaras CMOS rápidas, el tiempo de procesamiento de la imagen en la PC (por ejemplo, el cálculo de la desviación estándar de la imagen, etc.) puede ser mayor que la descarga de la imagen en sí. .
Los sensores utilizados en las cámaras C1 ofrecen una ganancia programable de 0 a 24 dB, lo que se traduce en la multiplicación de la señal de salida de 1× a 15,9×. La ganancia se puede configurar con un paso de 0,1 dB.
Factores de conversión y ruido de lectura
Generalmente, muchas características del sensor dependen de la ganancia utilizada. Por lo tanto, proporcionamos dos listas de parámetros para la ganancia mínima y máxima.
| Resolución de digitalización |
12 bits |
12 bits |
8 bits |
8 bits |
| Ganancia del sensor |
0dB |
24dB |
0dB |
24dB |
| Capacidad total del pozo |
11000 e - |
1100 e - |
2600 e - |
1100 e - |
| Factor de conversión |
2.8 e - /ADU |
0.3 e - /ADU |
10.0 e- / ADU |
4.4 e - /ADU |
| Leer ruido |
2.2 e - RMS |
2.0 e - RMS |
4.2 e - RMS |
9.7e - RMS |
Observación:
Tenga en cuenta que los valores indicados anteriormente no los publica el fabricante del sensor, sino que se determinan a partir de imágenes adquiridas con el paquete de software SIPS. Los resultados pueden variar ligeramente según la ejecución de la prueba, el sensor en particular y otros factores (por ejemplo, la temperatura del sensor, las condiciones de iluminación del sensor, etc.), pero también según el software utilizado para determinar estos valores, ya que el método se basa en el análisis estadístico del sensor. respuesta a la luz.
Las cámaras C1 son capaces de exposiciones muy cortas. El tiempo de exposición más corto es de 125 μs (1/8000 de segundo). Este es también el paso por el cual se expresa el tiempo de exposición. Entonces, la segunda exposición más corta es de 250 μs, etc.
La PC anfitriona controla el tiempo de exposición prolongada y no hay un límite superior en el tiempo de exposición. En realidad, las exposiciones más largas están limitadas por la saturación del sensor, ya sea por la luz entrante o por la corriente oscura (consulte el siguiente subcapítulo).
Refrigeración de sensores
La corriente oscura es una característica inherente de todos los circuitos de silicona. Se llama “oscuro”, porque se genera independientemente de si el sensor está expuesto a la luz o no. La corriente oscura, inyectada en píxeles individuales, aparece en la imagen como ruido. A mayor exposición, mayor cantidad de ruido está presente en cada imagen. Como se genera por el movimiento aleatorio de partículas, depende exponencialmente de la temperatura (es por eso que el ruido generado por la corriente oscura también se denomina “ruido térmico”). Por lo general, bajar la temperatura del sensor en 6 o 7 °C reduce a la mitad la corriente oscura.
Si bien las cámaras C1 no están equipadas con enfriamiento termoeléctrico activo (Peltier), aún están equipadas con un pequeño ventilador que intercambia el aire dentro del cuerpo de la cámara. Además, un pequeño disipador de calor está ubicado directamente en el sensor (con la excepción del modelo C1-1500, cuyo sensor es demasiado pequeño para el disipador de calor) para eliminar la mayor cantidad de calor posible. Por lo tanto, el sensor C1 no se puede enfriar por debajo de la temperatura ambiente, pero su temperatura se mantiene lo más cerca posible del ambiente. En comparación con los diseños cerrados, la temperatura del sensor en la cámara C1 puede ser hasta 10 °C más baja y la corriente oscura resultante puede ser menos de la mitad.
, mientras que las rejillas de ventilación de salida están en el lado opuesto (imagen de la derecha)")
La entrada de aire de refrigeración está en el lado izquierdo de la cámara (imagen de la izquierda), mientras que las rejillas de ventilación de salida están en el lado opuesto (imagen de la derecha)
El funcionamiento del ventilador se puede controlar desde el software. SIPS ofrece directamente un ventilador de control deslizante en la pestaña "Refrigeración" de la ventana principal de la herramienta de control de la cámara. Los controladores de cámara para otro software deben basarse en el cuadro de diálogo de configuración del controlador para controlar el ventilador.

Con el ventilador apagado, la temperatura del sensor aumenta rápidamente más de 10 °C por encima de la temperatura ambiente. Al encender el ventilador, la temperatura baja 5 °C o más.
Muchas monturas de telescopios astronómicos (especialmente los fabricados en masa) no son lo suficientemente precisos para mantener las imágenes de estrellas perfectamente redondas durante largas exposiciones sin pequeñas correcciones. Las cámaras astronómicas refrigeradas y las cámaras SLR digitales permiten imágenes perfectamente nítidas y de alta resolución, por lo que incluso una pequeña irregularidad en el seguimiento de la montura aparece como deformación de la imagen estelar. Las cámaras C1 se diseñaron especialmente teniendo en cuenta el guiado de montaje automático.
Las cámaras C1 se diseñaron para funcionar sin piezas mecánicas móviles (con la excepción del ventilador que levita magnéticamente). El obturador electrónico permite exposiciones extremadamente cortas y también obtener miles de imágenes en poco tiempo, lo cual es necesario para un guiado de calidad.
Las cámaras C1 funcionan en conexión con una computadora host (PC). Las correcciones de guiado no se calculan en la propia cámara, solo envía las imágenes adquiridas al PC. El software que se ejecuta en la PC calcula la diferencia del estado requerido y envía las correcciones apropiadas a la montura del telescopio. El lado positivo de usar una CPU de PC anfitriona para procesar imágenes es el hecho de que las PC actuales brindan una potencia computacional abrumadora en comparación con cualquier procesador integrado dentro de la cámara guía. Los algoritmos de guía pueden determinar la posición de la estrella con una precisión de subpíxeles, pueden hacer coincidir varias estrellas para calcular la diferencia promedio, lo que limita los efectos de la vista, etc.
Las correcciones calculadas se pueden enviar de vuelta a la montura mediante el enlace de PC a montura. Si el controlador de montaje no es compatible con los llamados comandos de "Guía de pulso", es posible usar el puerto "Autoguider". Basta con conectar la cámara C1 y la montura mediante un cable estándar de 6 hilos y guiar la montura a través de la cámara.
La corriente de hundimiento máxima de cada pin de la cámara C1 es de 400 mA. Si la montura no trata el puerto de autoguiado solo como una entrada lógica, sino que cambia los motores de guía directamente por estas señales, se debe insertar una caja de relés entre la cámara y la montura. La caja de relés asegura la conmutación de las corrientes requeridas por la montura.

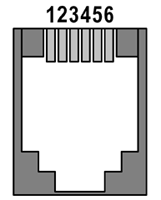
El puerto Autoguider estándar de 6 pines se encuentra al lado del puerto USB3 en la parte superior de la cámara C1
El puerto Autoguider sigue el estándar de facto introducido por el autoguiador SBIG ST-4. Los pines tienen las siguientes funciones:
 |
| 1 |
AR + (Derecha) |
| 2 |
Dic + (Arriba) |
| 3 |
Dic – (Abajo) |
| 4 |
AR – (Izquierda) |
| 5 |
Terreno común) |
| 6 |
No conectado |
|
Especificaciones mecánicas
El cabezal de la cámara C1 está diseñado para ser liviano y compacto para acoplarse fácilmente incluso a telescopios o visores pequeños. El cabezal de cámara compacto y robusto mide solo 57 × 57 × 48 mm sin incluir el adaptador de lente.
La cabeza está mecanizada por CNC a partir de aluminio de alta calidad y anodizada en negro. El cabezal en sí contiene un conector USB-B 3.0 (dispositivo) y un conector de "autoguiado" estándar de 6 pines.
| Obturador mecánico interno |
No |
| Tiempo de exposición más corto |
125 μs |
| Mayor tiempo de exposición |
Limitado solo por la saturación del chip |
| Dimensiones de la cabeza |
57 mm × 57 mm × 48 mm (sin adaptador de lente) |
| Distancia focal trasera |
12,5 mm para rosca 1/32 UN (compatible con montaje CS) |
| |
18,5 mm para rosca M42 × 0,75 (montaje en T) |
| Peso del cabezal de la cámara |
215 gramos |
Adaptadores de telescopio/lente
Las cámaras C1 se suministran con dos tipos de adaptadores de telescopio/lente:
-
Adaptador con rosca 1/32 UN y distancia focal posterior de 12,5 mm (montaje CS).
-
Adaptador con rosca M42 × 0,75 (rosca T) y distancia focal trasera de 18,5 mm. Este adaptador también contiene rosca interior 1/32 UN con 12,5 mm BFD (montaje CS).
 (izquierda) y con adaptador de montura CS (derecha)")
Cámara C1 con adaptador de rosca en T (M42 × 0,75) (izquierda) y con adaptador de montura CS (derecha)
CS-mount es compatible con una gran cantidad de lentes de CCTV. Si se tiene que usar una lente con montura C (con una distancia focal trasera de 17,5 mm), se puede usar un anillo adaptador simple de 5 mm de grosor.
Advertencia:
Si la cámara C1 se debe usar con OAG para cámaras Cx o Gx refrigeradas, se debe usar un adaptador de barril corto de 10 mm C a 1,25". Este adaptador, enviado con el respectivo OAG, es totalmente compatible con la cámara C1.
Tenga en cuenta que la cámara C1 con adaptador M42 × 0,75 (rosca en T) no se puede usar con OAG, a pesar de que se le puede conectar el adaptador de barril corto CS a 1,25". El adaptador M42 de gran diámetro interfiere con los tornillos que fijan la cámara en el puerto de guiador OAG Por este motivo, todavía se suministra la variante C1 con solo adaptador de montura CS.
El adaptador de cilindro C a 1,25”, compatible con oculares estándar de 1,25”, está incluido en el paquete de la cámara. Por lo tanto, la cámara C1 se puede montar fácilmente en prácticamente todos los telescopios astronómicos en lugar de un ocular.
La interfaz de montaje en T (también conocida como adaptador de rosca en T) se define por las dimensiones de la rosca M42 × 0,75, así como por la distancia focal posterior de 55 mm. El adaptador de rosca en T para cámaras C1 no cumple con el segundo parámetro, su BFD es de solo 18,5 mm. El BFD de 55 mm no es necesario en todas las aplicaciones y mantener un BFD relativamente grande haría que el adaptador fuera bastante voluminoso.
Aún así, está disponible un tubo de extensión con rosca macho M42 × 0,75. Este tubo de extensión convierte el BFD de la cámara C1 a 55 mm, requerido por numerosos reductores focales, aplanadores de campo, correctores de coma y otros elementos ópticos.
Hay dos variantes de los tubos de extensión BFD de 55 mm disponibles:
-
Tubo de extensión con M42 × 0,75 (rosca en T) en el lado del telescopio.
-
Tubo de extensión con rosca M48 × 0,75 más grande en el lado del telescopio.
, tubo de extensión BFD de 55 mm con rosca M42 × 0,75 (centro) y con rosca M48 × 0,75 (derecha)")
Cámara C1 (izquierda), tubo de extensión BFD de 55 mm con rosca M42 × 0,75 (centro) y con rosca M48 × 0,75 (derecha)
Además, están disponibles tubos de extensión con interfaces de bayoneta para lentes fotográficos estándar:
Insinuación:
El diámetro exterior del tubo de extensión es exactamente de 2 pulgadas (50,8 mm), por lo que puede permitir el uso de la cámara C1 con cualquier enfocador de 2" en lugar de un ocular de 2".

Cámara C1 con lente Canon EOS acoplada
Trípode y roscas métricas
 y 4 orificios roscados métricos M3")
La parte inferior de la cámara C1 contiene una rosca estándar de 0,25" (trípode) y 4 orificios roscados métricos M3
Si la cámara C1 no está conectada al enfocador del telescopio a través de su adaptador de telescopio/lente, puede conectarse a un trípode fotográfico estándar usando una rosca de 0,25". Otra posibilidad es utilizar 4 agujeros roscados M3 métricos, también situados en la parte inferior del cabezal de la cámara.

Posición de los cuatro orificios roscados M3 en la parte inferior del cabezal de la cámara C1
Dimensiones de la cámara C1
Dimensiones de la vista frontal del cabezal de cámara C1 con adaptador de montura CS (izquierda) y dimensiones de la vista lateral y distancia focal trasera (derecha)
Cabezal de cámara C1 con adaptador M42 × 0,75 dimensiones de la vista frontal (izquierda) y dimensiones de la vista lateral y distancia focal trasera (derecha)
La compatibilidad con el software y los controladores de las cámaras CMOS de la serie Cx es tan amplia como la de sus hermanas con cámaras CCD de la serie Gx.
Sin embargo, se deben instalar las últimas versiones de todos los paquetes de software y controladores para usar las cámaras Cx.
-
Si la cámara C1 está conectada directamente a la PC host mediante un cable USB, se debe instalar un nuevo controlador de sistema CxCamera.sys (consulte el manual "Instalación y uso de controladores y software", que se envía con cada cámara). El paquete de preinstalación del controlador del sistema versión 2.3 y posteriores contiene este controlador.
-
Cuando la cámara C1 está conectada a través del dispositivo adaptador Ethernet de cámara Moravian, el dispositivo debe actualizarse a la versión de firmware 42 o posterior para que funcione con cámaras CMOS (consulte la “Guía del usuario del adaptador Ethernet de cámara Moravian” para conocer el procedimiento de actualización del firmware).
Insinuación:
Cuando el SIPS está conectado a la cámara mediante el dispositivo adaptador Ethernet de cámara de Moravian, muestra la versión de firmware del dispositivo adjunto en el área de notificación del Centro de acción de Windows.
-
Los paquetes y bibliotecas de controladores de Linux también deben actualizarse a las últimas versiones. Vea la sección de Descargas de este sitio para más detalles.
El paquete de software SIPS (Scientific Image Processing System) versión 3.16 o posterior es necesario para controlar las cámaras C1.
Advertencia:
La compatibilidad con cámaras Cx basadas en CMOS se agregó gradualmente a la versión SIPS individual. Si bien las versiones anteriores de SIPS menores podrían reconocer las cámaras C1, siempre use v3.16 o posterior para una operación confiable de la cámara.
Los controladores de cámara C1 para paquetes de software de terceros también deben actualizarse para que funcionen con cámaras C1. Las versiones mínimas para los controladores respectivos son:
-
Controladores ASCOM versión 4.10
-
Controladores para TheSkyX (todas las versiones para Windows, MacOS y Linux) versión 2.2
-
Controladores Astroart versión 3.2
El potente software SIPS (Scientific Image Processing System), suministrado con la cámara, permite un control completo de la cámara (exposiciones, enfriamiento, selección de filtros, etc.). También se admiten secuencias automáticas de imágenes con diferentes filtros, diferentes binning, etc. Con compatibilidad total con el estándar ASCOM, SIPS también se puede utilizar para controlar otros equipos de observación. Específicamente los soportes del telescopio, pero también otros dispositivos (enfocadores, controladores de cúpula o techo, receptores GPS, etc.).
SIPS también es compatible con la guía automática, incluido el tramado de imágenes. Se admiten tanto la interfaz de hardware del puerto "autoguiador" (cable de 6 hilos) como los métodos de guía de montaje "Pulse-Guide API". Para monturas de alta calidad, capaces de rastrear sin la necesidad de guiar al final durante una exposición, solo está disponible la guía entre imágenes usando la cámara principal.
")
SIPS controlando todo el observatorio (mostrado en piel oscura opcional)
Pero SIPS es capaz de hacer mucho más que solo controlar la cámara y el observatorio. Hay muchas herramientas disponibles para la calibración de imágenes, manejo de archivos FITS de 16 y 32 bits, procesamiento de conjuntos de imágenes (p. ej., combinación de medianas), transformación de imágenes, exportación de imágenes, etc.















